Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 31 dezembro 2024

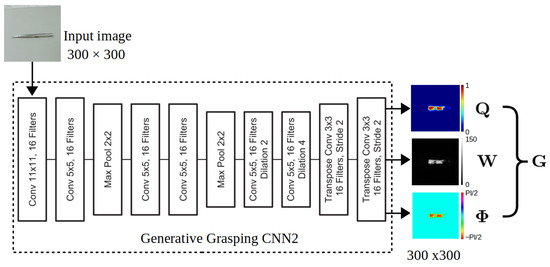
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.

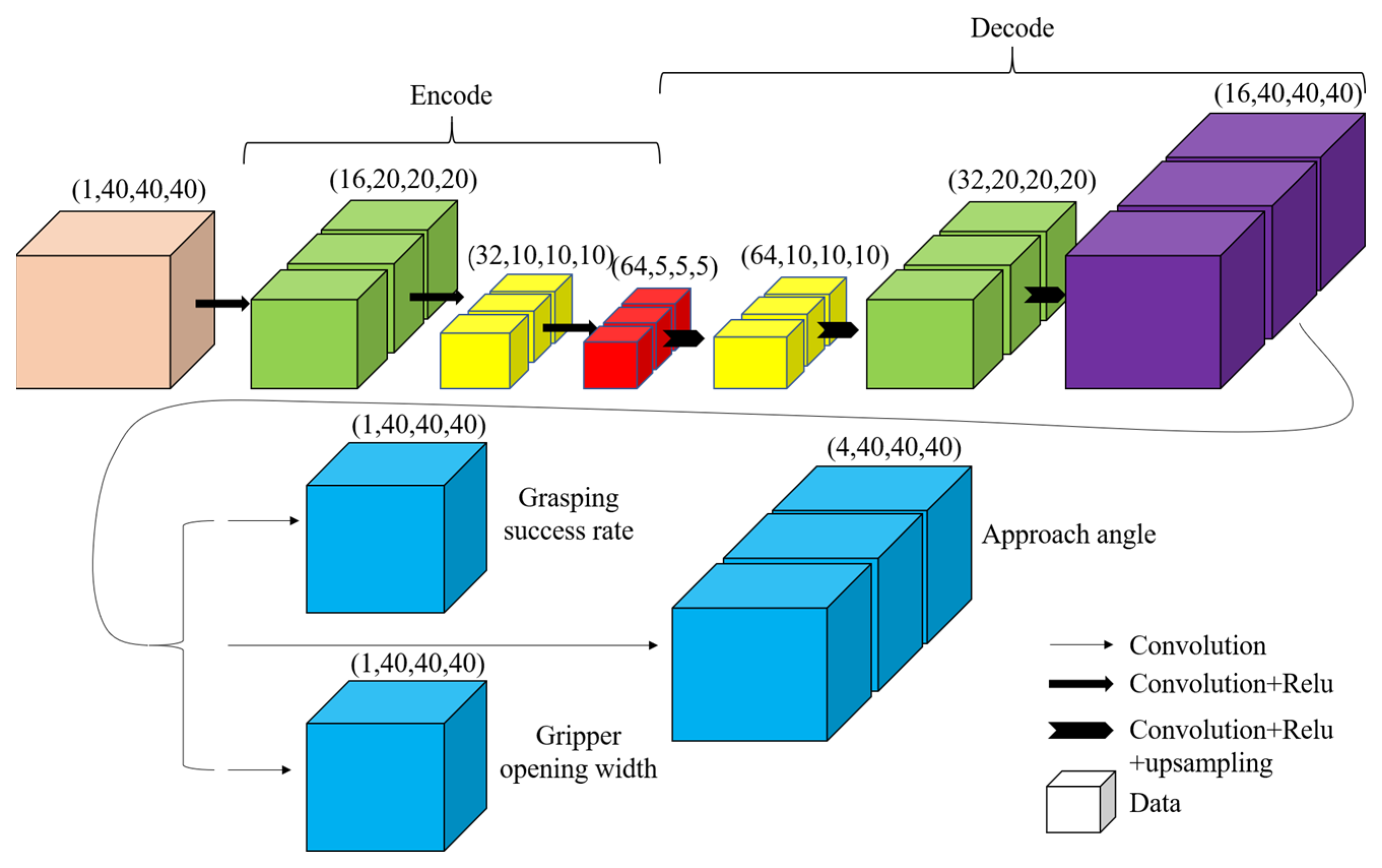
A grasps-generation-and-selection convolutional neural network for

PDF] Efficient and Accurate Candidate Generation for Grasp Pose

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
Machines, Free Full-Text

Dex-Net 2.0 Architecture. (Center) The Grasp Quality Convolutional

Deep learning for detecting robotic grasps - Ian Lenz, Honglak Lee
Robotics, Free Full-Text

Dex-Net 2.0 pipeline for training dataset generation. (Left) The

PEGG-Net: Background Agnostic Pixel-Wise Efficient Grasp

3D Grasp Pose Generation from 2D Anchors and Local Surface

Grasp Pose Detection in Point Clouds - Andreas ten Pas, Marcus

Vision-based robotic grasping from object localization, object

Data-driven robotic visual grasping detection for unknown objects
Recomendado para você
-
 Candidate-se indígena: Chamado para as eleições 202031 dezembro 2024
Candidate-se indígena: Chamado para as eleições 202031 dezembro 2024 -
 NOVOCast #41 O Brasil conta com você: candidate-se!31 dezembro 2024
NOVOCast #41 O Brasil conta com você: candidate-se!31 dezembro 2024 -
 Mestrado em Saúde Pública (MPH) na Johns Hopkins University (JHU31 dezembro 2024
Mestrado em Saúde Pública (MPH) na Johns Hopkins University (JHU31 dezembro 2024 -
 Vivek Ramaswamy continues S.E Iowa campaign blitz with Bloomfield31 dezembro 2024
Vivek Ramaswamy continues S.E Iowa campaign blitz with Bloomfield31 dezembro 2024 -
Concept of ferrielectricity and candidate material BaFe 2 Se 3 . a31 dezembro 2024
-
 Candidate-se e participe do Processo Eleitoral para escolha dos31 dezembro 2024
Candidate-se e participe do Processo Eleitoral para escolha dos31 dezembro 2024 -
Candidate-se ao - Instituto Nacional de Saúde - Moçambique31 dezembro 2024
-
 New York Democrats pick Tom Suozzi as their candidate for George31 dezembro 2024
New York Democrats pick Tom Suozzi as their candidate for George31 dezembro 2024 -
 ISQ Venha fazer parte da equipa ISQ! Se é recém formado31 dezembro 2024
ISQ Venha fazer parte da equipa ISQ! Se é recém formado31 dezembro 2024 -
 Candidate-se agora ao formulário de informações sobre o conceito de trabalho31 dezembro 2024
Candidate-se agora ao formulário de informações sobre o conceito de trabalho31 dezembro 2024

você pode gostar
-
![PT-BR] Estado Atual do Splinterlands: Qual Liga Jogar?](https://images.ecency.com/DQmaonJ16PEKQ6ynKwK3uD8nfCyeyuw2GSnb4moqck4pGta/image.png) PT-BR] Estado Atual do Splinterlands: Qual Liga Jogar?31 dezembro 2024
PT-BR] Estado Atual do Splinterlands: Qual Liga Jogar?31 dezembro 2024 -
![SPY x FAMILY: Season 1 Part 1 [Blu-ray] : Various, Various: Movies & TV](https://m.media-amazon.com/images/W/MEDIAX_792452-T2/images/I/81cilbmPSIL._AC_UF1000,1000_QL80_.jpg) SPY x FAMILY: Season 1 Part 1 [Blu-ray] : Various, Various: Movies & TV31 dezembro 2024
SPY x FAMILY: Season 1 Part 1 [Blu-ray] : Various, Various: Movies & TV31 dezembro 2024 -
 UO UO No Mi Kaido Devil Fruit31 dezembro 2024
UO UO No Mi Kaido Devil Fruit31 dezembro 2024 -
 Everything We Know About 'Ant-Man and the Wasp: Quantumania31 dezembro 2024
Everything We Know About 'Ant-Man and the Wasp: Quantumania31 dezembro 2024 -
 Prince of Persia: Warrior Within™, PC Game31 dezembro 2024
Prince of Persia: Warrior Within™, PC Game31 dezembro 2024 -
 Shito - Traditional Condiment Recipe from Ghana31 dezembro 2024
Shito - Traditional Condiment Recipe from Ghana31 dezembro 2024 -
 Velocidade Furiosa 9 - FOX Portugal: Receba as últimas novidades das suas séries FOX, FOX Crime, FOX Comedy, FOX Life, FOX Movies, MundoFOX31 dezembro 2024
Velocidade Furiosa 9 - FOX Portugal: Receba as últimas novidades das suas séries FOX, FOX Crime, FOX Comedy, FOX Life, FOX Movies, MundoFOX31 dezembro 2024 -
 Five Nights at Freddy's Poster Game 8 X 10 Algeria31 dezembro 2024
Five Nights at Freddy's Poster Game 8 X 10 Algeria31 dezembro 2024 -
Cipcup music download31 dezembro 2024
-
Jungkook - Shot Glass of Tears Color Coded Lyrics / Lirik Terjemahan I31 dezembro 2024
