Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Last updated 22 dezembro 2024

Design of the reconfigurable joint.

A Novel Design of Extended Coaxial Spherical Joint Module for a New Modular Type-Multiple DOFs Robotic Platform

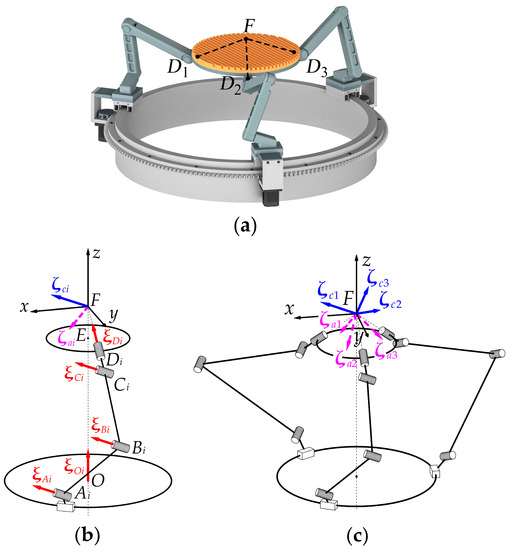
Forward kinematics of spherical parallel manipulators with revolute joints

Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Geometry and kinematics for a spherical-base integrated parallel mechanism – topic of research paper in Mechanical engineering. Download scholarly article PDF and read for free on CyberLeninka open science hub.
Robotics, Free Full-Text

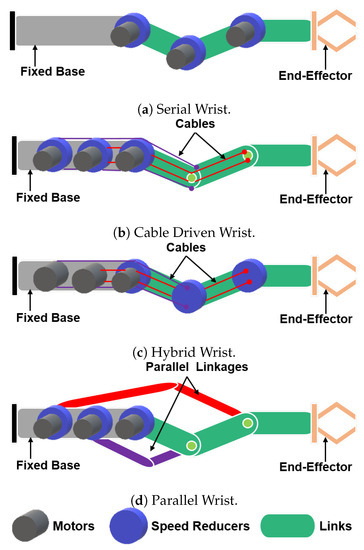
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)
Robotics, Free Full-Text

Design and implementation of a maxi-sized mobile robot (Karo) for rescue missions, ROBOMECH Journal
Recomendado para você
-
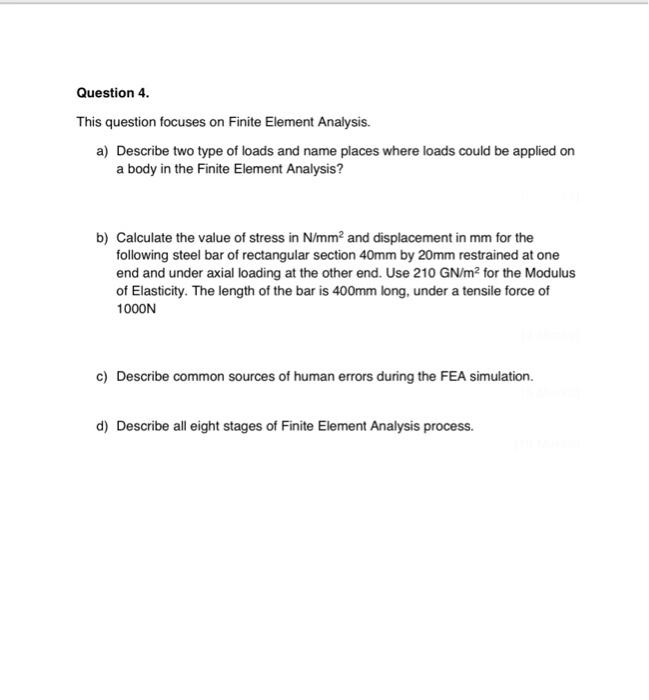
Solved b) Calculate the value of stress in N/mm2 and22 dezembro 2024
-
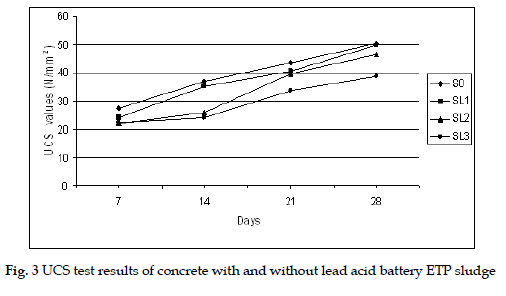 UTILIZATION OF INDUSTRIAL EFFLUENT TREATMENT PLANT (ETP) SLUDGE AS PARTIAL REPLACEMENT FOR CEMENT IN CONCRETE22 dezembro 2024
UTILIZATION OF INDUSTRIAL EFFLUENT TREATMENT PLANT (ETP) SLUDGE AS PARTIAL REPLACEMENT FOR CEMENT IN CONCRETE22 dezembro 2024 -
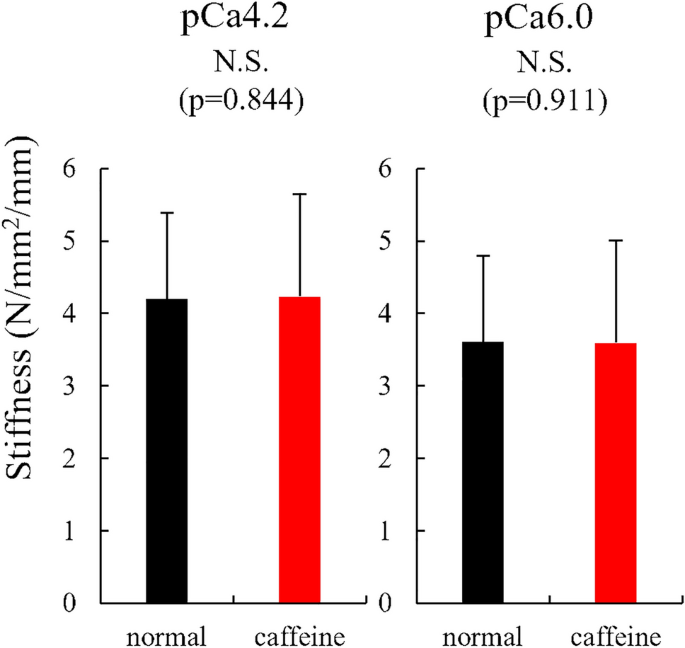 Influence of caffeine on the maximal isometric and concentric force produced by skinned fibers22 dezembro 2024
Influence of caffeine on the maximal isometric and concentric force produced by skinned fibers22 dezembro 2024 -
 Strength Dlubal Software22 dezembro 2024
Strength Dlubal Software22 dezembro 2024 -
 Effect of Storage Medium and Aging Duration on Mechanical Properties of Self-Adhesive Resin-Based Cements - Anja Liebermann, Nicoleta Ilie, Malgorzata Roos, Bogna Stawarczyk, 201722 dezembro 2024
Effect of Storage Medium and Aging Duration on Mechanical Properties of Self-Adhesive Resin-Based Cements - Anja Liebermann, Nicoleta Ilie, Malgorzata Roos, Bogna Stawarczyk, 201722 dezembro 2024 -
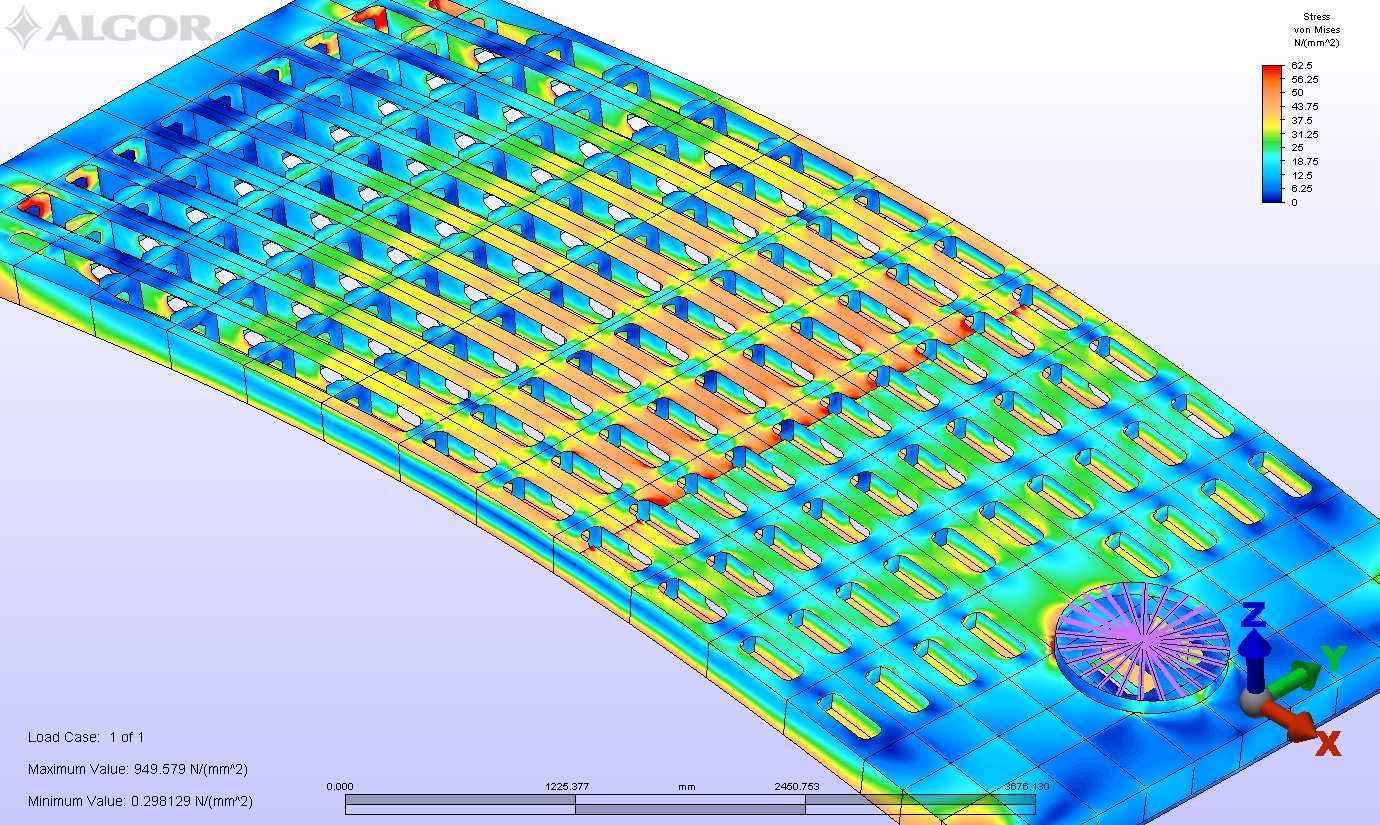 Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.22 dezembro 2024
Finite Element Analysis (FEA) • Gregory C. Marshall Naval Architect Ltd. • Gregory C. Marshall Naval Architect Ltd.22 dezembro 2024 -
60mil RF-35 PCB with immersion gold for power amplifiers22 dezembro 2024
-
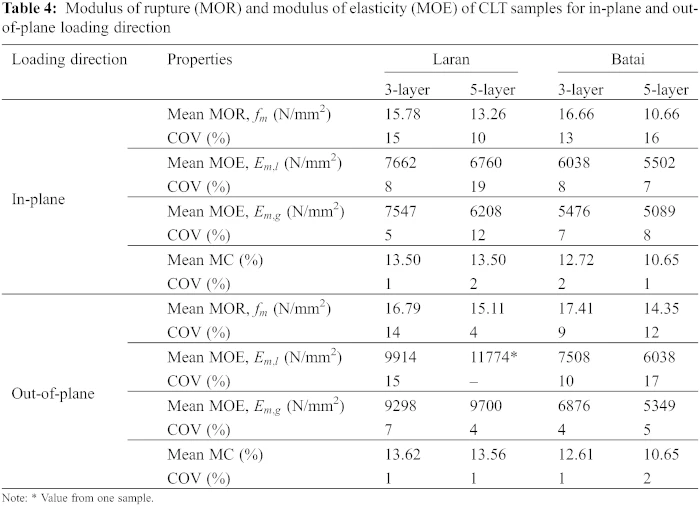 Bending, Compression and Bonding Performance of Cross-Laminated Timber (CLT) Made from Malaysian Fast-Growing Timbers22 dezembro 2024
Bending, Compression and Bonding Performance of Cross-Laminated Timber (CLT) Made from Malaysian Fast-Growing Timbers22 dezembro 2024 -
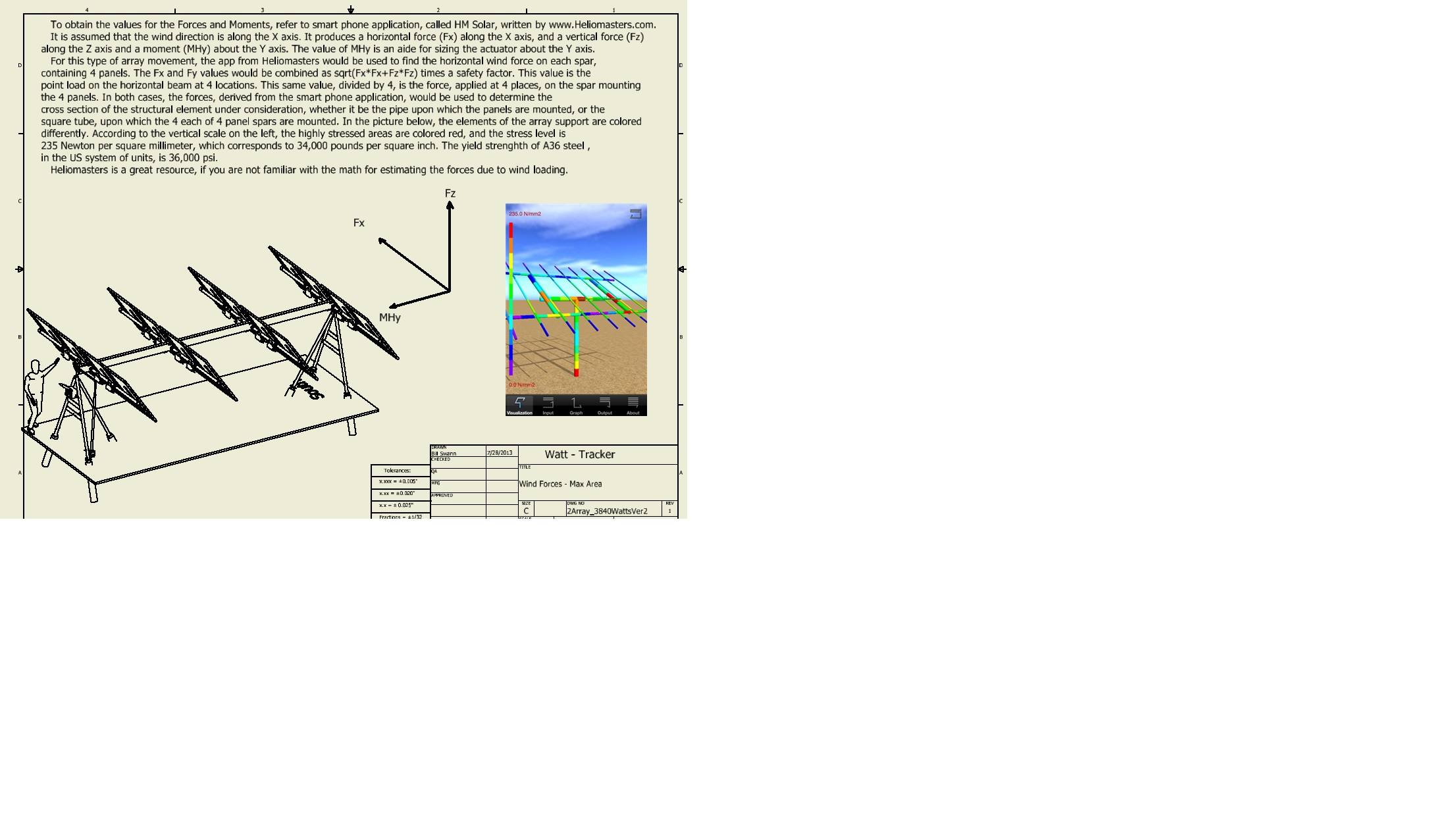 Wind Forces22 dezembro 2024
Wind Forces22 dezembro 2024 -
 Autoclaved Lightweight Aerated Concrete Panel Specification22 dezembro 2024
Autoclaved Lightweight Aerated Concrete Panel Specification22 dezembro 2024

você pode gostar
-
 FIFA Mobile 21 – FIFPlay22 dezembro 2024
FIFA Mobile 21 – FIFPlay22 dezembro 2024 -
 Camp Half-Blood Chronicles Percy Jackson & The Olympians Annabeth Chase PNG, Clipart, Acampamento Meiosangue, Bird22 dezembro 2024
Camp Half-Blood Chronicles Percy Jackson & The Olympians Annabeth Chase PNG, Clipart, Acampamento Meiosangue, Bird22 dezembro 2024 -
 The main characters of Redo of Healer22 dezembro 2024
The main characters of Redo of Healer22 dezembro 2024 -
🌳🌿 O primeiro Hokage está de volta! Reagindo ao rap do Hashirama, a22 dezembro 2024
-
My Hero Academia - Missão mundial de heróis Trailer Dublado - video Dailymotion22 dezembro 2024
-
 BULLY 2 - Everything We Know! (2022 Edition ft bad employee22 dezembro 2024
BULLY 2 - Everything We Know! (2022 Edition ft bad employee22 dezembro 2024 -
 Fast and Furious: Tokyo Drift' at JANM - Rafu Shimpo22 dezembro 2024
Fast and Furious: Tokyo Drift' at JANM - Rafu Shimpo22 dezembro 2024 -
 How to fix Valorant voice chat not working22 dezembro 2024
How to fix Valorant voice chat not working22 dezembro 2024 -
 Like Souls22 dezembro 2024
Like Souls22 dezembro 2024 -
 PC USB Box 31 Functions Back Lit Blue Push Buttons Toggles22 dezembro 2024
PC USB Box 31 Functions Back Lit Blue Push Buttons Toggles22 dezembro 2024
